De RoboTobor LMTRF-methode
De integratie-ontwikkelmethode voor een veilige en robuuste AGV/AMR-oplossing. Lay-out, Materiaalstroom, Techniek, Route en Formule vormen samen de sleutel tot succesvolle geautomatiseerde intralogistieke AGV/AMR-systemen.

Layout
Samen brengen we het volledige gebouw in kaart – van intralogistieke infrastructuur en machines tot software- en hardwareoplossingen. We visualiseren deze complexe en dynamische omgeving in 2D of 3D als basis voor robotisering en AGV/AMR-integratie.
Materiaalstroom
Ons doel is volledige grip op de materiaal- en informatiestromen, van inbound tot outbound en van grondstof tot eindproduct – perfect afgestemd voor een naadloze AGV/AMR-integratie. Maak je al gebruik van Lean Manufacturing-principes zoals Just-In-Time om de materiaalstroom te optimaliseren?

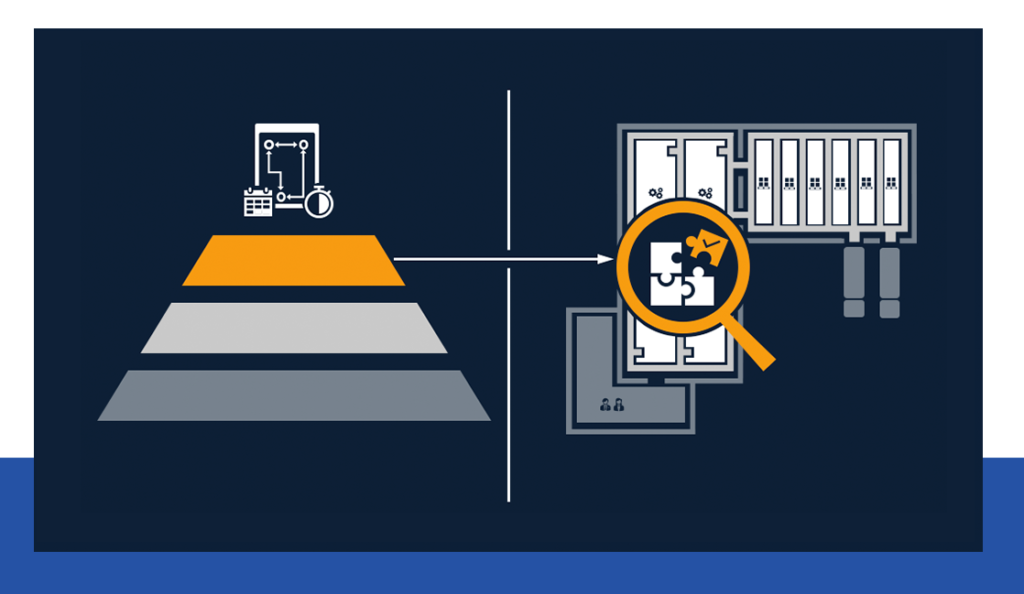
Techniek
Welke moderne intralogistieke technologieën passen in jouw layout? De juiste aanpak maakt interne logistiek efficiënter, veiliger en flexibeler. Vision-technologie stuurt AGV-opdrachten aan, terwijl slim geplaatste sensoren zorgen voor een feilloze bediening van robotcellen en machines – met veiligheid als prioriteit. Je materiaalstroom zoeft soepel door de layout.
Domeinkennis krijg je niet online, maar uit ervaring
Hoe zit dat precies?
Stel je robotisering vraag Over Automated Guided Vehicles (AGV) of Autonomous Mobile Robots (AMR)
Gratis antwoord
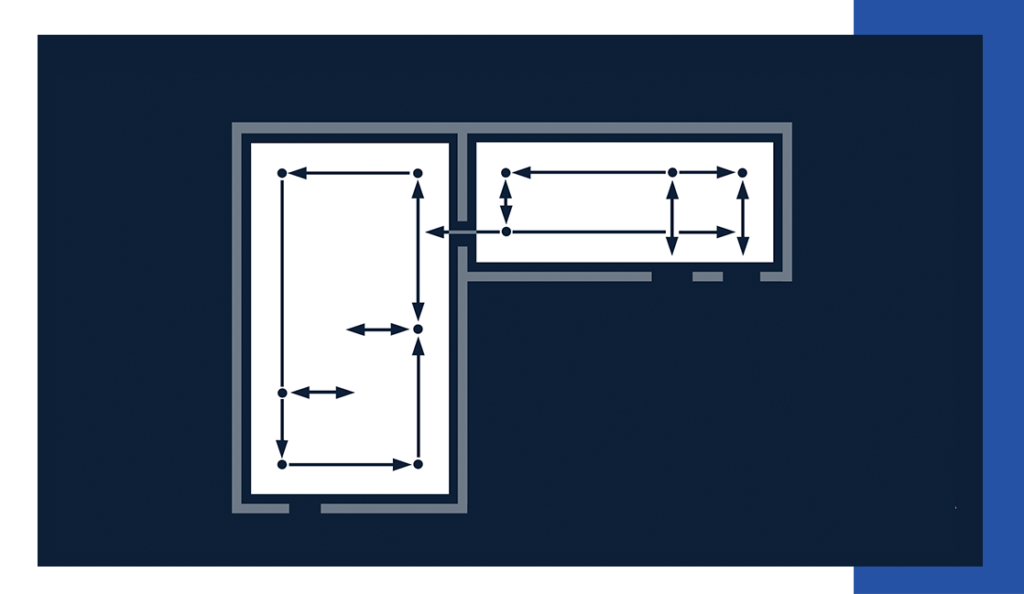
Route
Waar kan de AGV rijden en waar is de AMR juist in zijn element? Voor AGV’s draait het om vaste routeplanning, voor AMR’s om dynamische pathplanning. Het kiezen van het juiste, veilige voertuig en de meest effectieve routes voor jouw layout – van oppakpunt tot afzetpunt – is de expertise van RoboTobor.
Formule
Een AGV | AMR Consultant voor je robot project
- Fit-For-Purpose AGV/AMR-oplossingen
Optimale voertuigintegratie in jouw lay-out met de juiste robotintegratiepartner. - Efficiënte en veilige materiaalstromen
Het juiste proces, de juiste ladingdrager, van A naar B – zowel binnen als buiten. - Uitgewerkt document voor interne organisatie en leveranciers
Gebaseerd op de bewezen LMTRF-methode en ondersteund met de Totaalaanpak.

Lay-out analyse
Alles begrijpen in de beschikbare ruimte.
Lay-out ontwerp
Een slim en efficiënt ontwerp.
Materiaalstroom analyse
Materiaalstromen doorgronden.
Materiaalstroom ontwerp
Efficiënte materiaalstromen, hoge productiviteit.
Simuleren
Layout-model getest en geoptimaliseerd.
Wat levert de LMTRF methode op?
- Verlaging van de kosten
Dankzij de vakkennis en marktexpertise van RoboTobor, ik weet precies hoe het werkt.
- Investering in een veilige duurzame robot applicatie
Robot technologie en een technologieleverancier die passen bij jouw onderneming.
- Vermindering van het project- en ondernemings-risico
RoboTobor laat je zien en voelen hoe de aanpak van een mobiel robot project werkt.
- Een betrouwbare partner
Meer dan 12 jaar robot ervaring en uitgebreide marktkennis van diverse industrieën.
- Succesvolle AGV / AMR concepten en oplossingen,
Ondersteund met Material Handling en Intralogistieke expertise.
Wat wil je nog weten over de LMTRF-methode?
Hoe kies ik de juiste AGV- of AMR-leverancier voor mijn magazijnproces?
Met welk proces of materiaalstroom start ik een AGV- of AMR-project?
Hoe kunnen AGV’s of AMR’s omgaan met pieken in mijn materiaalstroom?
Past een AGV- of AMR-systeem in mijn huidige productie layout?
Welke soorten materialen kunnen AGV’s en AMR’s verplaatsen?
Kunnen AGV’s en AMR’s 24/7 opereren?
Hoe veilig zijn AGV’s en AMR’s in mijn productieomgeving?
Hoe stel ik een businesscase op voor een AGV/AMR-systeem?
Voor een succesvol AGV/AMR-project.